|
PIAS Handleiding
2025
Programma voor de Integrale Aanpak van het Scheepsontwerp
|
|
PIAS Handleiding
2025
Programma voor de Integrale Aanpak van het Scheepsontwerp
|
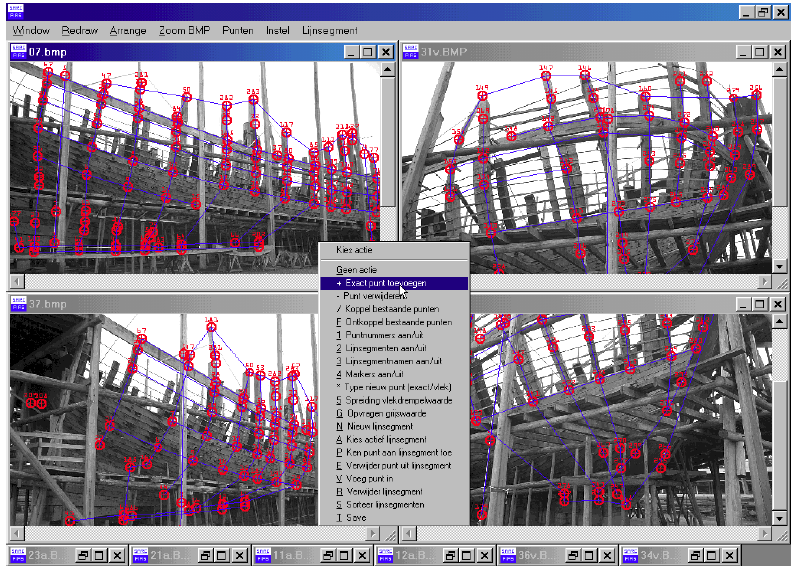
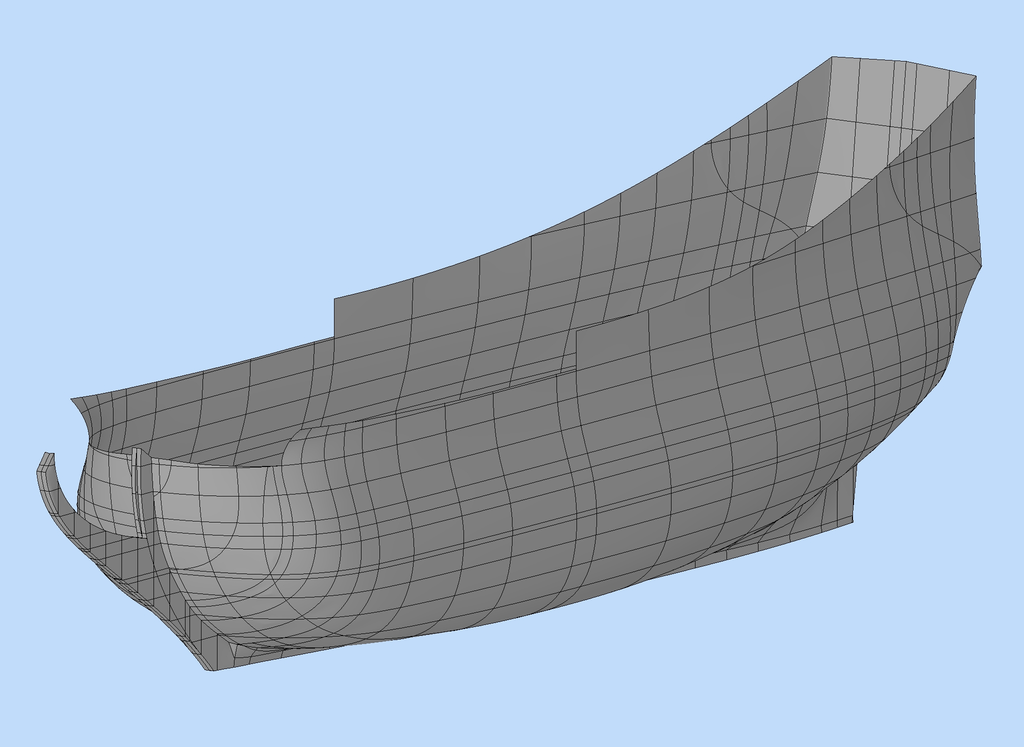
Het uiteindelijke doel van reverse engineering is het verkrijgen van een ondubbelzinnig 3D model van de rompvorm. De rol die PhotoShip speelt in dit proces bestaat uit het construeren van een draadmodel, die bestaat uit meetpunten en door de gebruiker gedefinieerde lijnsegmenten tussen deze meetpunten. Op basis van dit draadmodel wordt vervolgens met behulp van Fairway een solid model gegenereerd (zie Convert Wireframe to Solid). Ook alle andere Fairway faciliteiten kunnen bij een met fotogrammetrisch opgemeten scheepsvorm gebruikt worden, m.n. nabewerking van de romplijnen ( Draadmodellen) en exporteren van het 3D scheepsmodel.
De werking van fotogrammetrie berust op stereovisie. De 3D coördinaten van meetpunten worden berekend op basis van de afbeeldingen van deze meetpunten op meerdere foto's. Men kan hier een vergelijking trekken met de mens, die om diepte te zien ook twee ogen nodig heeft. Dit principe wordt geïllustreerd in de volgende figuur:
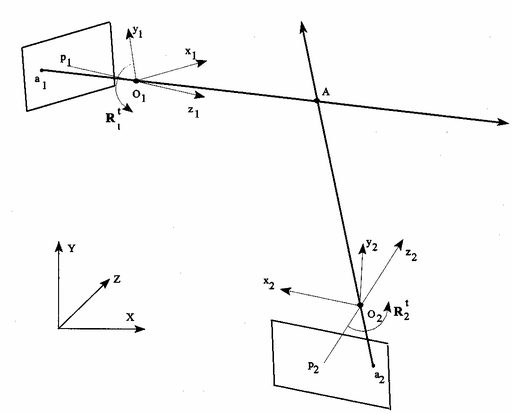
Te zien zijn de afbeeldingen a1 en a2 van punt A op twee verschillende foto's. Vanuit a1 en a2 kunnen twee zichtlijnen worden getrokken die door de brandpunten O1 en O2 gaan. Het snijpunt van deze twee zichtlijnen definieert de 3D coördinaten van A. Dit principe noemt men `intersection'. De externe oriëntatie van elke foto dient bekend te zijn. Deze wordt berekend aan de hand van zogenaamde referentiepunten. Dit zijn meetpunten waarvan de 3D coördinaten al bij voorbaat bekend zijn, en die tevens gebruikt worden om het uiteindelijke model de juiste schaal en oriëntatie te geven. Omdat er met gemeten waarden wordt gewerkt, zullen de zichtlijnen elkaar echter niet exact snijden, en kan er dus ook geen exacte oplossing worden gevonden. Daarom wordt het hele systeem van meetpunten en externe oriëntaties numeriek (iteratief) geoptimaliseerd met de kleinste kwadraten methode. Om dit te kunnen doen, dienen er beginwaarden voor de coördinaten van de meetpunten berekend te zijn. Het resultaat hiervan is de meest nauwkeurige set 3D coördinaten van de meetpunten. Op deze manier wordt met meerdere foto's en meerdere meetpunten de rompvorm compleet in kaart gebracht.
De volgende stappen dienen genomen te worden:
Dit proces wordt stap voor stap beschreven in www.sarc.nl/images/stories/photoship/article_photoship_en.pdf